在線客服
pid溫控器電路工作原理
圖1 表示了本控制器的電原理圖。
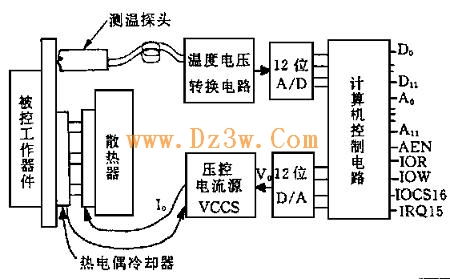
圖1 控制器原理圖
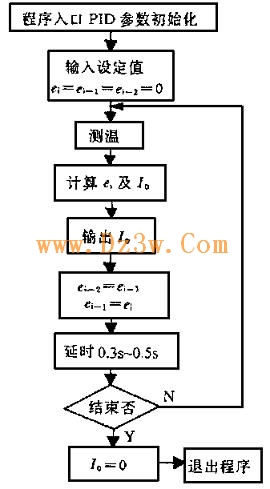
程序啟動后, 首先進行PID 參數初始化, 最主要的是對Kp、Ti、Td、T 的初始化, 然后進入控制循環體。首先是采集溫度值, 按上述的PID 控制規律及壓控電流源的控制特性計算熱電偶冷卻器的工作電流I0 的大小及極性, 然后輸出到D/A 轉換器, 由其產生VCCS 的輸入控制電壓V0。程序延遲0.3~0.5s 后, 重復上述過程, 不斷根據最新測到的溫度計算最近的控制量。這樣多次重復后,就可以達到穩定控制溫度的目的。圖2 給出了程序流程框圖。
pid溫控器參數的選擇
如前所述, PID 的主要參數是KP、Ti 及Td。其選擇方法是: 首先根據控制系統的特性確定K p 的極性。在本文中, 其極性應為負, 而不是文獻[2]中所要求的正極性; 并且實驗發現, 本系統雖然屬于具有延遲效應的溫度控制系統, 但Kp 不能選擇過大, 否則將不穩定。其次, Ti 及Td 的選擇相對而言就不是很嚴格了, 可根據設計者的要求(如希望積分作用明顯還是微分作用明顯) 而定。關于采樣周期則可以根據系統響應的延遲時間而定, 一般可選擇比系統響應稍快些即可, 選擇過小的采樣周期反而不好。本文選擇的是與系統響應時間相當的采樣周期, 約0.3~ 0.5s。PID 參數的選擇不是唯一的, 但一定要選擇好關鍵參數。在本文中則應仔細選擇Kp ,然后再選擇其它參數。只要一組PID 參數能夠較好地用于控制系統, 并且控制效果也是較好的, 則說明這樣一組參數是合適的。
本文中的PID 參數選擇如下: Kp =- 1.0, Ti= 2, Td= 1.5, T = 0.3, 這樣的一組PID 參數可以達到良好的控制效果。
實驗結果
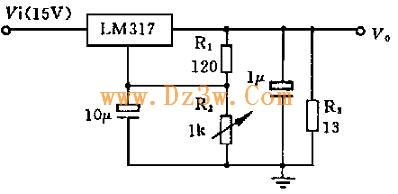
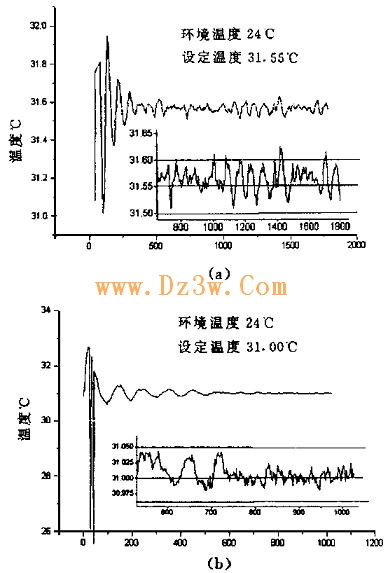
為了驗證控制器的工作情況, 我們設計了一種模擬實驗條件, 電路如圖3 所示。通過改變R2 的阻值, 便可相應地改變穩壓器LM 317 消耗的功率, 也即其自身的溫度會相應地改變。在環境溫度為24℃時, 當不進行控制時其溫度可以達到約70℃; 后采用本控制器對其進行溫度控制, 測得的結果如圖4(a)、(b) 所示(圖中橫坐標為采樣時間序列,每點對應約0.4 秒) , 可見精度達到了±0.05℃, 控制效果是很好的。
結束語
PID 控制原理的優點在于能夠在控制過程中根據預先設定好的控制規律不停地自動調節控制量以使被控系統朝著設定的平衡狀態過度, 最后達到控制范圍精度內的穩定的動態平衡狀態。
要使用好PID 控制原理, 關鍵在于根據實際情況確定PID 的各種參數, 這項工作可能是費時的, 但做好了, 將會提高控制器的使用效果, 達到較高的控制精度, 是值得的。
pid溫控器產品介紹http://www.stepuptechacademy.com/
 返回首頁
返回首頁
 加入收藏
加入收藏
 聯系我們
聯系我們
 網站地圖
網站地圖